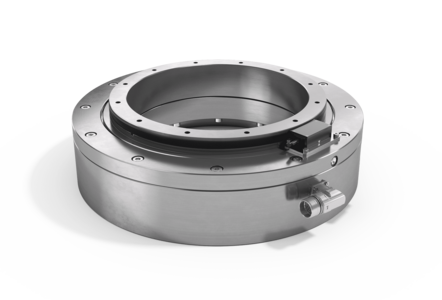
Entraînement par couple
Entraînement direct type LTD
609818

Description
Matériaux
Température de fonctionnement
Position de montage
Lubrifiant
Options
| Précision | |
| Vitesse | |
| Gamme Ø | |
| Prix |
Super compact et super personnalisable: Table rotative Franke avec moteur couple LTD
Données générales
- Boîtier en acier ou en aluminium
- KKØ : 100 - 1800 mm
- Système de mesure incrémentielle
- Système de mesure absolue
Avantages
- Conception compacte
- Grand dégagement au centre
- Libre choix des composants
- Quatre tailles standard en stock
- Des solutions sur mesure sont
également possibles
Fonctionnement et avantages:
Compact
Dynamique
Efficacité énergétique
Conception compacte, grand dégagement au centre
Les tables rotatives Franke à entraînement direct intégré (moteur couple) se caractérisent par une dynamique élevée, une efficacité énergétique maximale et un encombrement très limité.
Les couronnes d'orientation à entraînement direct Franke sont certifiés pour une utilisation en salle blanche.


Diamètres disponibles
Les tables rotatives Franke à entraînement direct sont disponibles dans des diamètres allant de 100 mm à 1 800 mm.
Tableau de données

| Tableau 1 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Nom | ΚΚØ mm | Capacités de charge kN | Couple Nm | Puissance A | Vitesse de rotation 1/min. | Poids kg | |||||
| C0a | C0r | Ca | Cr | MNenn | MPeak | INenn | IPeak | nmax | |||
| LTD-0100 | 100 | 46 | 22 | 17 | 14 | 4,5 | 16 | 1,8 | 7 | - | 8 |
| Données nominales | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Produit | MNennLk | INennLk | nNennLk | PNennLk | PVNennLk | PGNennLk | MHaltLk | IHaltLk | |||
| Nm | Aeff | U/min | W | W | W | Nm | Aeff | ||||
| LTD-0100 | 4,5 | 1,8 | ? | 1005 | 54 | 96 | 3,2 | 0 | |||
| Données à charge de pointe | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Produit | MPeak | IPeak | nPeak | PPeak | PVPeak | PGPeak | |||||
| Nm | Aeff | U/min | W | W | W | ||||||
| LTD-0100 | 16 | 7 | 1130 | 1897 | 863 | 877 | |||||
| Vue d'ensemble des performances | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Produit | kt | ke | ke | km | nLeer | nmax | fmax | Uzk | RPh20 | ||
| Nm/Aeff | Veff/(rad/s) | Veff/(U/min) | Nm/vW | U/min | U/min | Hz | VDC | Ω | |||
| LTD-0100 | 0,459 | 1,577 | 0,165 | 0,459 | 2390 | - | 398 | 560 | 4,419 | ||
| Système de mesure | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Produit | Principe de mesure | Marque de référence | Longueur du câble | Période de division | Nombre de lignes | Alimentation | Connexion électrique | ||||
| LTD-0100 | induktiv | 1 Referenzmarke | 1 | 1000 | 256 | 4V bis 7V DC | Flanschdose M23 | ||||
LTD-100

Mes contacts pour ce produit
Votre contact local
Félix Houssay
Agora Technique
8 Bis Rue Volta
Parc Volta
F-94140 Alfortville
Tél.: +33 1 45 18 43 70
agora@agora-technique.com
Couronne d'orientation en whitepaper avec entraînement par torque
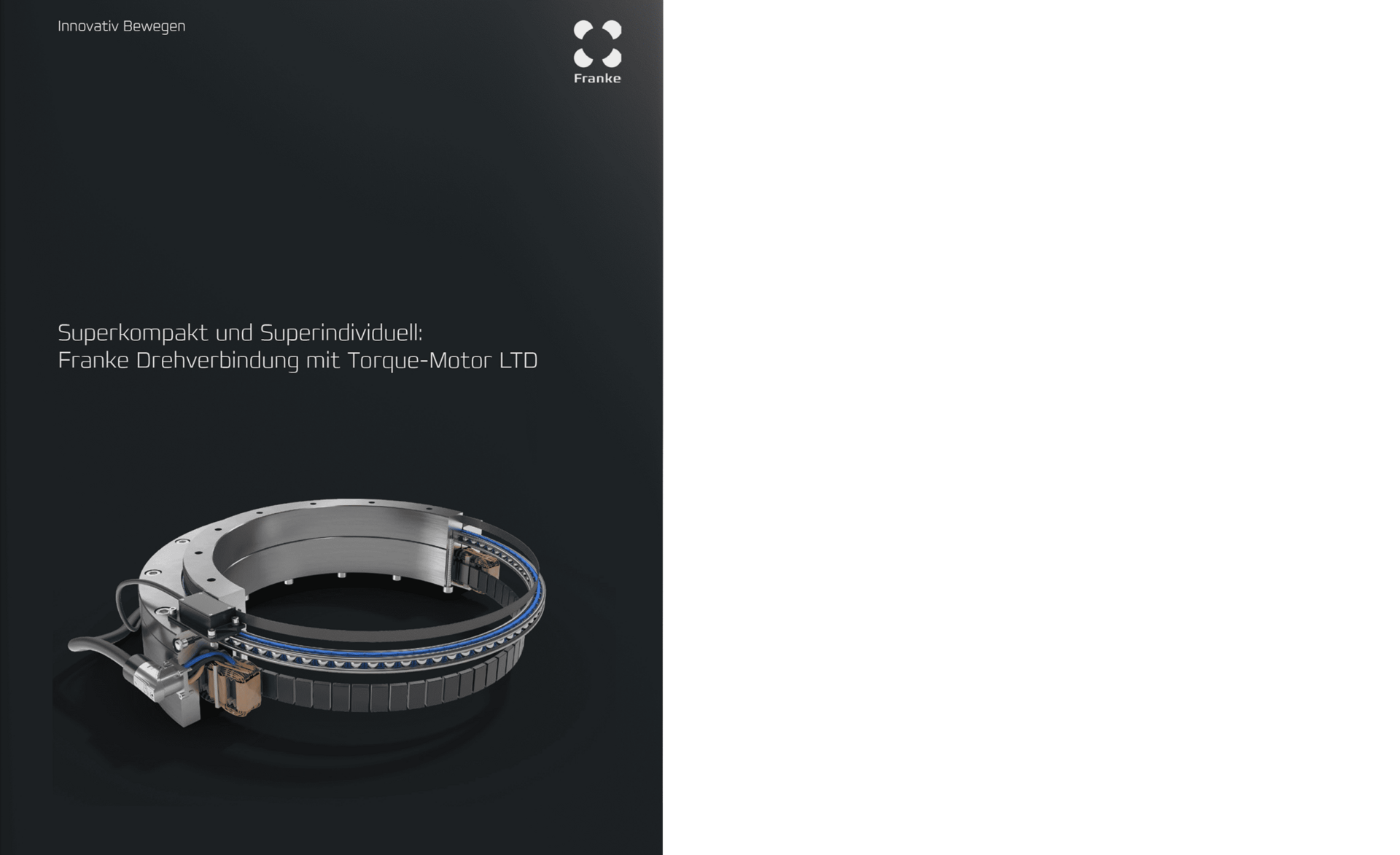
Découvrez-en plus sur les couronnes d'orientation avec moteur torque intégré et pourquoi elles sont supérieures aux autres types d'entraînement à presque tous les égards.
À l'avenir, vous pourrez vous passer de composants tels que les boîtes de vitesses et les pignons d'entraînement.

Laissez-nous vous conseiller!
D'un expert Franke via le chat vidéo, chez vous ou chez nous.